
”路径规划 A* JPS 算法对比 地图“ 的搜索结果

包含相同地图下(一共6种地图,10*10,20*24,40*40,60*60,80*80,100*100)A*算法与JPS算法的实现,以及两种算法的运行时间、占用内存以及路径长度的对比

学更好的别人,做更好的自己。——《微卡智享》本文长度为1035字,预计阅读3分钟前言前面几篇我们把A*算法和JPS的算法都简单介绍了一下,并且展现出来了行动规划,其中A*算法的核心代码我...
为了验证WPS算法的有效性,设计了多种非结构化复杂场景地图,对A·、JPS算法和WJPS算法在寻路时间、扩展点数和路径长度3方面进行了对比。实验结果显示,相比A·算法和JS算法,W門S算法在复杂环境中能保证生成路径是...

一文弄懂基于图搜索的路径规划算法JPS(有python代码)



在ROS下用C++实现A* /JPS算法 A* 算法流程 见文件:src/grid_path_searcheer/src/demo_node.cpp 主函数 main 1. int main(int argc, char** argv) 2. { 3. ...... 4. //订阅到地图信息的回调函数 5. _map_sub = nh....
摘自:腾讯游戏开发精粹(摘录一次加深记忆方便查找,如有侵权 联系作者删除 谢谢) 如感兴趣,请购买原书支持
深蓝路径规划作业-第二章
标签: 算法
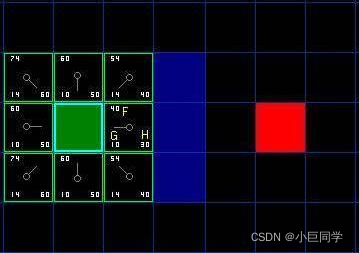
此外,A*算法扩展效率慢,当地图变大的时候,效率很低,计算耗时很大。这个obstacle_map主要是生成地图上的障碍,当rand小于0.45并且不是起始点和终止点的时候产生障碍map点。之后的功能主要是维护。

JPS全称是:jump point search,这个算法实际上是对A* 寻路算法的一个改进,A* 算法在扩展节点时会把节点所有邻居都考虑进去,这样openlist中点的数量会很多,搜索效率较慢。 那么JPS多做了啥事呢? 在一次寻路过程...
一文弄懂基于图搜索的A*与Dijkstra
A*是一个比较经典的启发式寻路算法。是基于dijkstra算法,但是加入了启发函数,使路径搜索效率更高。实现起来很简单。不过要做到通用性高,比如支持各种不同类型的地图,甚至不仅仅是地图,而是个图结构如解决拼图...
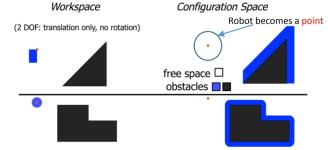
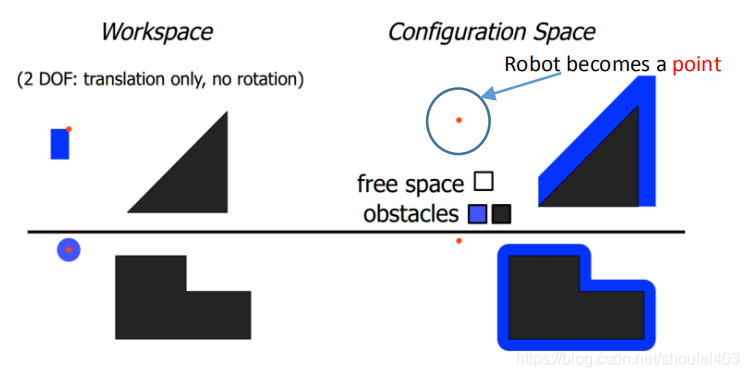
它的基本思想是将栅格地图的路径搜索和Control Lattice Graph结合起来,让栅格地图中的每一个方格中只存在一个节点。 选择不同的控制量u驱动向前去积分,积分得到的不同状态保持在每个栅格地图中的机器人可执行节点...
移动机器人路径规划算法综述(二)
标签: 算法
机器人的路径规划技术,其实是参照某一个参数 的指标( 如工作代价值最低,选择路径最短,运算时间消耗最短等) ,在任务区域选择出一条可从起点连接到终点的最优或次优的避障路径。其本质是在几个约束条件下得到最优...

移动机器人路径规划(二)--- 图搜索基础,Dijkstra,A*,JPS
学更好的别人,做更好的自己。——《微卡智享》本文长度为3087字,预计阅读8分钟前言上两篇我们主要就是说了A*算法结合OpenCV进行室内地图路线规划,在具体使用过程中发现,遇到比较复杂...
简单记录JPS原理
基于搜索的路径规划算法是较为成熟和广泛使用的一种路径规划算法,常常被用于移动机器人或者游戏中的人物的路径规划。

推荐文章
- confluence搭建部署_ata confluence-程序员宅基地
- SpringCloud与SpringBoot版本对应关系_springboot 2.1.1 对于的cloud-程序员宅基地
- 如何恢复硬盘数据?简单解决问题_磁盘恢复 csdn-程序员宅基地
- 苹果手机测试网络速度的软件,App Store 上的“网速测试大师-测网速首选”-程序员宅基地
- 教了一年少儿编程,说说感想和体验-程序员宅基地
- 22东华大学计算机专硕854考研上岸实录-程序员宅基地
- 如何用《玉树芝兰》入门数据科学?-程序员宅基地
- macOS使用brew包管理器_brew清理缓存-程序员宅基地
- 【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值-程序员宅基地
- 常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理-程序员宅基地